

بنیانگذاران جوان قاعده کسبوکار استارتآپی را تغییر دادند؛ سن کمتر و توقع رشد بیشتر
بنیانگذاران استارتآپها امروز بدون سابقه کار در گوگل و متا، میلیونها دلار سرمایه جذب میکنند؛…
۱۰ مرداد ۱۴۰۵






۲۷ اسفند ۱۴۰۲
زمان مطالعه : ۴ دقیقه
استارتآپ به نام Waabi که در حوزه خودروهای خودران فعالیت دارد میخواهد از هوش مصنوعی مولد برای کمک به پیشبینی حرکت خودروها استفاده کند. به گفته MIT Technology Review، این سیستم جدید که Copilot4D نام گرفته با حجم زیادی از دادههای لیدار آموزش دیده است. دادههای رادارهای لیدار، که از نور برای ایجاد یک نقشه و تشخیص فاصله استفاده میکنند، برای پیشبینی نحوه حرکت در آینده استفاده میشود.
به گزارش پیوست، این سیستم با دریافت پرامپت مربوط به یک شرایط خاص، مثلا رانندگی بی احتیاط و با سرعت بالای یک راننده، میتواند نحوه حرکت خودروهای اطراف را پیشبینی کند و سپس نمایهای لیدار از ۵ تا ۱۰ ثانیه در آینده ارائه می:ند.
بیانیه منتشر شده از شرکت به نسخه اولیه Copilot4D اشراه دارد اما راکول اورتاسون، مدیرعامل Waabi، میگوید نسخهای پیشرفتهتر و قابل تفسیر در کامیونهای خودران این شرکت رد تگزاس به کار رفته تا نحوه عملکرد آن بررسی شود.
با اینکه خودروهای خودران پیش از این از یادگیری ماشینی برای برنامهریزی مسیرها و تشخیص اشیا استفاده میکنند، اما برخی از شرکتها و محققان به استفاده از هوش مصنوعی مولد روی آوردهاند و ممکن است این فناوری گام بعدی رانندگی خودکار باشد. شرکت دیگری به نام Wayve، یکی از رقبای Waabi، نیز مدل مشابهی را سال گذشته منتشر کرد که با استفاده از ویدیوهای جمعآوری شده از خودروها آموزش دیده است.
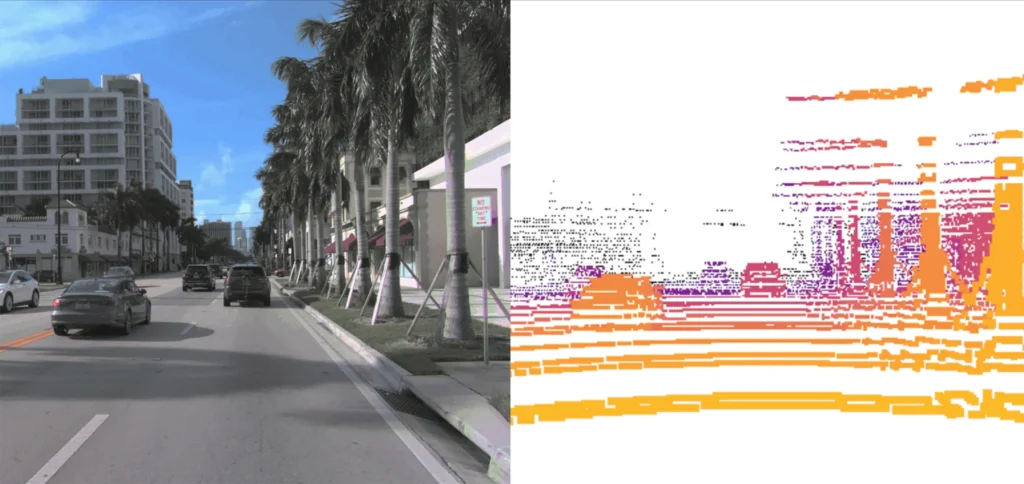
مدل Waabi عملکردی شبیه به سیستمهای مولد تصویر یا ویدیو، همچون DALL-E و سورا از شرکت اوپنایآی، دارد. این سیستم ابرهایی از نقاط داده لیدار را گرفته و نقشهای سهبعدی از اطراف کار تشکیل میدهد. سپس این نقشه همانطور که در تصویر زیر مشاهده میکنید به بخشهای مختلفی تفکیک میشود. سپس سیستم Copilot4D، براساس دادههای آموزشی نحوه حرکت تمام نقاط دادههای لیدار را پیشبینی میکند. این کار که به صورت مداوم انجام میشود یک بازه ۵ تا ۱۰ ثانیهای از آینده را پیشبینی میکند.
شرکت Waabi یکی از چند شرکت رانندگی خودران در کنار رقبایی مثل Wayve و Ghost است که رویکردی با «اولویت هوش مصنوعی» را در پیش گرفتهاند. اورتاسون میگوید این رویکرد به معنای طراحی سیستمی است که از دادهها یاد میگیرد و میتوان آن را برای واکنش به شرایط خاصی آموزش داد. این شرکتها معتقدند که روش مد نظر آنها با استفاده از ساعتهای کمتری رانندگی آزمایش میتواند به نتیجه برسد. پس از تصادفی از یک تاکسی روباتی که اکتبر ۲۰۲۳ یک فرد پیاده را در سن فرانسیسکو روی زمین کشاند، موضوع رانندگی آزمایشی اهمیت بالایی پیدا کرده است.
تفاوت رویکرد شرکت Waabi در این است که این شرکت مدل هوش مصنوعی مولد را برای لیدار میسازد و نه دوربینها.
اور تاسون، با اشاره به سطحی از خودروی خودران که برای حرکت امن هیچ نیازی به انسان ندارد، میگوید: «اگر میخواهید یک بازیکن سطح ۴ باشید، لیدار یک ضرورت است.» دوربینها به خوبی آنچه ماشین مشاهده میکند را به نمایش میگذارند اما عملکرد خوبی در تشخیص فاصله یا درک هندسه اطراف خودرو ندارند.
با اینکه مدل Waabi هم میتواند با استفاده از حسگرهای لیدار، ویدیوهایی از اطراف خودرو تولید کند اما این ویدیوها به عنوان داده آموزشی برای شبیهساز این شرکت استفاده نمیشوند. چنین رویکردی از آنجایی است که هرگونه توهم احتمالی از Copilot4D، برای آموزش در شبیهساز استفاده نشود.
برنارد ادام لانگ، دانشجوی PhD دانشگاه استنفورد، که مدلهای مشابهی را بررسی و ساخته است، میگوید این فناوری چیز تازهای نیست اما این اولین باری است که مدل لیدار مولد از آزمایشگاه خارج شده و یک کاربرد تجاری را هدف میگیرد. به گفته او مدلی شبیه به این را میتوان برای کمک به ساخت «مغز» خودروهای خودران استفاده کرد تا خیلی سریع و دقیقتر استدلال کنند.
مدل Copilot4D تنها چند ثانیه در آینده را پیشبینی میکند زیرا عملکرد این مدلها افزایش فاصله به آینده ضعیفتر میشود. به گفته مدیرعامل Waabi، تنها به ۵ تا ۱۰ ثانیه پیشبینی در آینده نیاز است اما در بررسیهای آزمایشی تنها از یک پیش بینی ۳ ثانیهای استفاده شده است.
کریس گردز، همبنیانگذار مرکز تحقیقات خودرو استنفورد، میگوید این فاصله زمانی معیار مهمی در عملکرد مدل برای تصمیمگیری است: «اگر پیشبینی ۵ ثانیهای عالی باشد اما پیشبینیهای ۱۰ ثانیهای را به ندرت بتوان استفاده کرد، تعداد موقعیتهایی که این رویکرد در جاده به کار میآید کافی نخواهد بود.»